无人机领域的VLA-WorldModel-可微分物理融合调研
触发
用户要求调研无人机领域的VLA、World Model和可微分物理融合,特别指出"无人机领域的输入是通用模型"。
核心论文
1. AutoFly: Vision-Language-Action Model for UAV Autonomous Navigation (ICLR 2026)
核心贡献:端到端VLA模型用于无人机自主导航,从"指令跟随"转向"自主行为建模"。
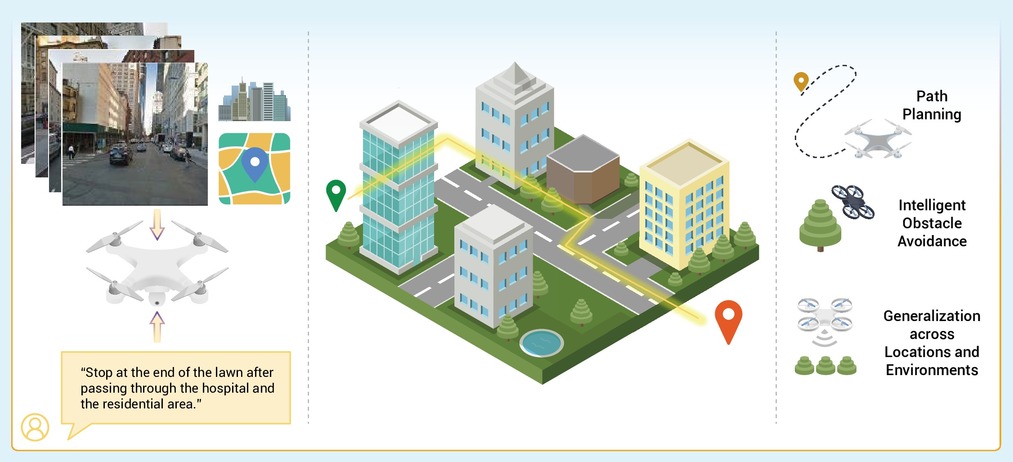
关键设计:
- 伪深度编码器:从RGB输入提取深度感知特征,增强空间推理
- 两阶段训练:有效对齐视觉、深度和语言表示与动作策略
- 自主导航数据集:强调持续避障、自主规划和识别工作流
关键发现:比SOTA VLA基线高3.9%成功率,在模拟和真实环境中表现一致。
局限性:
- 仍依赖深度估计
- 未显式建模物理约束
2. RynnVLA-002: A Unified Vision-Language-Action and World Model (arxiv 2511.17502)
核心贡献:统一VLA和World Model的联合框架,实现双向增强。
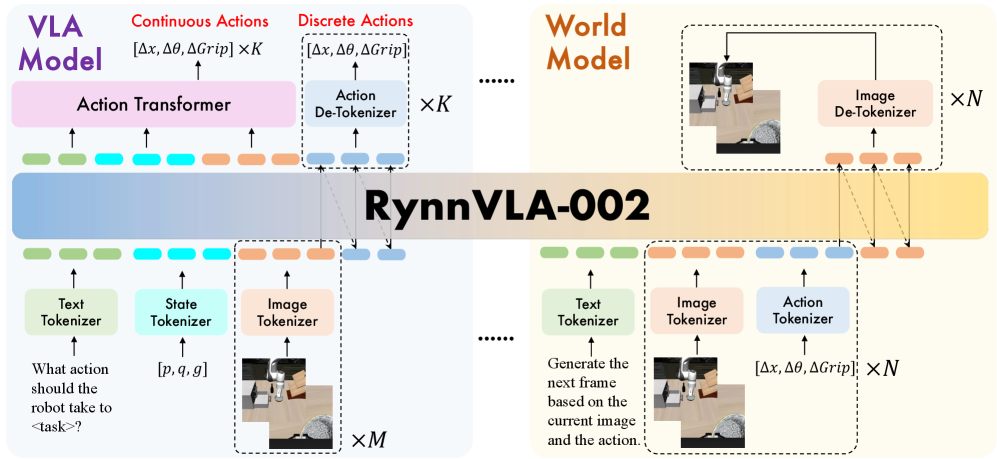
关键发现:
| 组件 | 角色 | 类比 | 核心能力 |
|---|---|---|---|
| VLA | 执行引擎 | 反射 | 视觉+语言 → 动作 |
| World Model | 预测模拟器 | 想象力 | 学习物理规律,模拟未来状态 |
双向增强:
- WM帮助VLA:World Model训练目标要求准确预测物体运动,强化对物体交互的关注
- VLA帮助WM:VLA的图像理解能力增强World Model的生成性能
实验证据:
- 无WM数据的VLA:真实机器人成功率<30%
- 有WM数据的VLA:成功率>80%
- LIBERO基准:97.4%成功率(无预训练)
3. Back to Newton’s Laws: Learning Vision-based Agile Flight via Differentiable Physics (Nature Machine Intelligence 2025)
核心贡献:可微分物理仿真训练端到端视觉导航策略。

关键发现:
| 特性 | 传统方法 | 可微分物理 |
|---|---|---|
| 物理模型 | 黑箱 | 显式建模 |
| 训练效率 | 低(RL需要大量样本) | 高(仅10%样本) |
| Sim-to-Real | 困难 | 零样本迁移 |
| 计算需求 | GPU | $21 ARM计算机 |
涌现行为:
- 无通信的群体导航
- 自组织行为:等待、跟随、让行
- 无里程计飞行
核心洞察:简单的质点物理模型足以实现sim-to-real迁移,无需高保真仿真。
4. Imperative MPC: Self-Supervised Learning with Differentiable MPC for UAV Attitude Control (L4DC 2025)
核心贡献:可微分MPC + 学习型惯性里程计的端到端自监督学习框架。
架构:
1 | IMU → 学习型IO(去噪) → 可微分MPC → 控制动作 |
关键发现:即使在大风条件下也有效,同时提升MPC参数学习和IMU预测性能。
5. AeroVerse-Review: UAV-VLN综合综述 (The Innovation Informatics 2025)
关键挑战:
- 动态可行性:3D空间中的控制与约束
- 感知泛化:复杂环境中的鲁棒性
- 语义接地:跨模态语义映射
- 长期推理:时空一致性
- 资源约束:边缘部署
未来方向:
- 标准化基准开发
- Sim-to-Real迁移
- 预训练大模型集成
- 具身World Model
融合架构分析
用户约束:“无人机领域的输入是通用模型”
这意味着无人机系统需要接收通用VLA模型的输出,而非专用领域模型。
1 | ┌─────────────────────────────────────────────────────────────┐ |
关键发现:可微分物理作为"物理过滤器"
从"Back to Newton’s Laws"的核心洞察:
简单的质点物理模型足以实现sim-to-real迁移
这提示我们:可微分物理不需要高保真,只需要正确的约束方向。
设计原则:
- 通用VLA:提供语义理解和动作候选
- World Model:预测动作后果,筛选不可行路径
- 可微分物理:提供确定性物理约束,优化轨迹
与RynnVLA-002的对比
| 维度 | RynnVLA-002 | 无人机适配方案 |
|---|---|---|
| VLA | 联合训练 | 冻结预训练 |
| World Model | 学习物理 | 可选(物理已知) |
| 物理约束 | 隐式学习 | 显式可微分 |
| 训练成本 | 高 | 低(仅适配层) |
关键论文对比
| 论文 | 领域 | VLA | World Model | 可微分物理 |
|---|---|---|---|---|
| AutoFly | 无人机导航 | ✓ | ✗ | ✗ |
| RynnVLA-002 | 机器人操作 | ✓ | ✓(学习) | ✗ |
| Back to Newton | 无人机导航 | ✗ | ✗ | ✓(显式) |
| Imperative MPC | 无人机控制 | ✗ | ✗ | ✓(MPC) |
下一步方向
- 架构设计:通用VLA + 可微分物理优化层
- World Model选择:是否需要学习型WM?还是纯物理约束足够?
- 训练策略:仅训练适配层,保持VLA冻结
参考文献
- AutoFly: Vision-Language-Action Model for UAV Autonomous Navigation [ref]
- RynnVLA-002: A Unified Vision-Language-Action and World Model [ref]
- Back to Newton’s Laws: Learning Vision-based Agile Flight via Differentiable Physics [ref]
- AeroVerse-Review: Comprehensive survey on aerial embodied vision-and-language navigation [ref]
- Imperative MPC: Self-Supervised Learning with Differentiable MPC for UAV Attitude Control [ref]
完成时间: 2026-03-05 20:35
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Aletheia!
评论